
The typical smartphone user likely perceives the small black circle next to their camera lens as a mere depth sensor for portrait mode, but recent breakthroughs in optical physics have transformed this humble component into a sophisticated tool for non-line-of-sight (NLOS) imaging. This capability, which involves detecting and reconstructing objects completely hidden from a direct field of view, was once a feat reserved for elite research laboratories equipped with hardware costing tens of thousands of dollars. Researchers at the MIT Media Lab have now demonstrated that the standard Light Detection and Ranging (LiDAR) sensors found in modern consumer devices can be repurposed to achieve this “superpower.” By analyzing the subtle behavior of light as it bounces off indirect surfaces, these scientists have successfully moved complex 3D reconstruction from controlled environments into the palm of the hand. This shift marks a pivotal milestone in the democratization of advanced spatial perception, indicating a future where the visual boundaries of physical obstacles are increasingly irrelevant to the devices people carry every day.
Decoding the Physics of Hidden Sight
Harnessing Scattered Light and Precise Timing
The operational foundation of this technology lies in the incredible speed and precision with which modern LiDAR sensors measure the flight of light. These components emit rapid laser pulses and calculate the exact duration it takes for the light to bounce off a surface and return to the receiver, measuring intervals in trillionths of a second, or picoseconds. While a standard camera sensor only records the light that travels in a straight line from an object to the lens, the NLOS system focuses on “scattered” light that would typically be discarded as background noise. When a laser pulse strikes a visible surface like a wall or a floor, the light does not simply stop; it scatters in various directions, with a small portion hitting a hidden object around a corner before reflecting back to the wall and finally reaching the phone.
To make sense of these incredibly faint and indirect signals, the system must distinguish the primary reflection—the wall—from the secondary and tertiary reflections originating from the hidden target. This requires an extreme level of temporal resolution to separate photons that arrive just a few picoseconds apart. By isolating these delayed light particles, the software begins to build a temporal profile of the environment that exists beyond the immediate line of sight. This process effectively treats every visible surface as a “virtual mirror,” allowing the sensor to gather data from areas that are physically obscured. The challenge lies in the fact that the returning signal is exponentially weaker than a direct reflection, necessitating highly specialized algorithms to amplify the relevant data while filtering out the overwhelming environmental interference that usually masks such subtle optical information.
Turning Movement Into a Functional Advantage
Because the hardware integrated into a consumer smartphone is significantly less powerful than the ultra-fast lasers and single-photon detectors used in professional optics labs, researchers had to find a way to bridge the performance gap through computational creativity. They developed a technique known as “motion-induced aperture sampling,” which fundamentally changes how the device collects data. Instead of requiring the user to hold the phone perfectly still, the system actually benefits from the natural, shaky movement of a handheld device. As the user moves the phone during a scan, the sensor captures the hidden scene from multiple perspectives and angles. This approach is reminiscent of synthetic aperture radar used by satellites, where the motion of the sensor over a target area creates a much higher-resolution image than would be possible from a single, stationary position.
This algorithmic solution leverages the “burst” photography logic already common in mobile devices but applies it to three-dimensional spatial data. By fusing multiple frames of noisy, low-resolution data into a single, cohesive 3D estimate, the software can reconstruct the hidden environment with surprising accuracy. This method essentially turns a sensor with a limited pixel count into a powerful, high-resolution imaging array through sheer computational intelligence. Moreover, the inherent instability of human hands provides a diverse set of viewpoints that help the algorithm resolve ambiguities in the hidden scene. This transformation of a hardware limitation into a functional advantage represents a significant shift in engineering philosophy, proving that sophisticated software can often compensate for the constraints of mass-produced consumer electronic components.
Experimental Success and Practical Capabilities
Reconstructing Shapes and Tracking Motion
The validation of this technology involved a series of rigorous real-world tests conducted by the MIT team to prove that the theory could hold up outside of a sanitized laboratory setting. In one primary experiment, the system successfully reconstructed the 3D shapes of objects hidden behind a partition, such as large letters or geometric structures. The resulting data is not a high-definition photograph but rather a “probability cloud” that accurately represents the size, scale, and position of the obscured items. While these ghostly 3D forms might appear abstract to a human eye, they provide more than enough information for a computer vision system to recognize the object’s identity and its distance from the observer. This ability to define the physical boundaries of the invisible is a massive leap forward for machine awareness.
Beyond static objects, the research demonstrated that this system is capable of dynamic, real-time tracking of moving targets. The researchers monitored a ball as it bounced around a corner and followed the hand movements of a person who was completely out of the sensor’s direct view. By utilizing retroreflective materials—common in safety gear and specialized clothing—the system could track motion with even higher precision. This capability suggests that a smartphone could potentially detect an approaching person or vehicle before they even enter the user’s field of vision. The real-time nature of this tracking is crucial, as it indicates that the computational overhead, while significant, is within the processing limits of modern mobile chips, making the technology viable for immediate applications in safety and interactive gaming.
Navigating Through Hidden Landmarks
A critical and perhaps less obvious breakthrough involves the use of hidden objects as “anchors” to assist a smartphone in understanding its own position in space. This process, known as spatial localization, is often difficult for traditional cameras in environments with blank walls, repetitive patterns, or low lighting where the software cannot find distinct visual features to track. By “looking” around corners and identifying the reflections of hidden landmarks, the LiDAR system provides the device with a much more stable set of reference points. Even if the immediate surroundings offer no visual cues, the device can maintain a precise sense of orientation by tracking its relationship to objects that are technically out of sight.
This level of spatial awareness ensures that the device remains accurately positioned within a digital map, which is essential for tasks like indoor navigation or architectural modeling. The system essentially uses the echoes of light to build a more comprehensive understanding of the room’s geometry than what is visible on the surface. This approach reduces the “drift” often experienced in augmented reality applications, where digital objects appear to slide across the floor because the phone has lost its physical bearings. By incorporating non-line-of-sight data into the localization pipeline, the smartphone gains a “depth of field” that extends through walls, allowing for a level of navigational stability that was previously impossible without external sensors or pre-mapped environments.
The Future of Machine Vision
The Transition From Hardware to Software
The success of this research highlights a profound broader trend in the technology industry: the transition from relying on expensive, specialized hardware to utilizing sophisticated, software-driven solutions. By using smart algorithms to compensate for the inherent limitations of consumer-grade sensors, the necessity for bulky and cost-prohibitive equipment is rapidly disappearing. The consensus among the scientific community suggests that the future of machine vision is not merely about developing better lenses or more powerful lasers, but about creating more intelligent ways to interpret the “garbage” data—such as scattered light and noise—that was previously ignored by older systems. This shift allows for the rapid deployment of high-end capabilities to millions of existing devices via simple software updates.
Furthermore, this evolution in computational photography and sensing democratizes access to professional-grade tools. When a hundred-dollar sensor can perform tasks that once required a fifty-thousand-dollar laboratory setup, the potential for innovation expands into new markets and creative fields. This transition also encourages a more sustainable approach to hardware development, as engineers can extract significantly more utility from existing components rather than requiring a constant cycle of physical upgrades. As machine learning models become more efficient at processing these complex light patterns, the gap between consumer electronics and specialized scientific instruments will continue to shrink, fundamentally changing the expectations for what a standard pocket-sized device can achieve in various environmental conditions.
Enhancing Safety Across Modern Industries
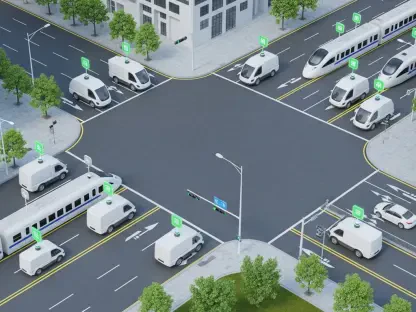
The implications for this technology extend far beyond novel smartphone applications, promising a significant revolution in safety and navigation across several major industries. In the rapidly evolving sector of autonomous vehicles, the ability to sense a pedestrian or a cyclist hidden behind a parked car or a building corner could provide the split-second warning needed to prevent a collision. Similarly, industrial robots operating in busy, cluttered warehouses could “peek” around aisles to avoid crashing into human workers or other machinery. This predictive sensing capability adds a crucial layer of redundancy to existing safety systems, allowing machines to move with greater confidence and speed in dynamic environments where line-of-sight is frequently obstructed.
Beyond industrial use, augmented reality (AR) and virtual reality (VR) benefit immensely from this spatial perception. Currently, AR headsets often lose track of a user’s hands or tools if they move outside the narrow field of view of the built-in cameras. Using smartphone-grade LiDAR to maintain a constant “awareness” of the user’s skeleton and surroundings—even when obscured—would make these immersive experiences feel far more natural and responsive. As these algorithms continue to improve, the boundary between the visible and the hidden will continue to fade. Stakeholders in the technology and automotive sectors should prioritize the integration of NLOS processing into their standard safety protocols, as the ability to perceive the unseen is no longer a theoretical luxury but a practical necessity for the next generation of autonomous and interactive systems.
The experimental results from the MIT Media Lab demonstrated a clear path forward for the integration of non-line-of-sight imaging into common consumer electronics. While the initial reconstructions were somewhat low in resolution, they provided critical spatial data that was previously inaccessible to mobile devices. Future development efforts focused on optimizing these algorithms for real-time processing on mobile chips, which enabled the technology to transition from a laboratory curiosity to a functional feature in navigation and safety apps. By treating every surface as a source of information rather than an obstacle, the research community redefined the limits of mobile sensing. This progress ensured that the next generation of machine vision systems could operate with a level of environmental awareness that mirrored, and in some ways exceeded, the natural capabilities of human sight.